Problem.
Driverless rides remove real-time human reassurance, leaving riders without context for decisions and increasing uncertainty throughout the journey. A system to reduce uncertainty across arrival, in-ride decisions, and environment

I designed three systems to reduce uncertainty in autonomous rides by improving first contact, in-ride communication, and environmental comfort.
The Current Landscape.
Current transportation platforms optimize for logistics, pricing, and scale—but underinvest in rider trust and real-time reassurance.

The Exploration.
I started by mapping the emotional arc of a first-time AV ride — from booking to arrival to the ride itself.
At each stage I asked: Where does a human driver normally provide reassurance. What happens when that's removed? That question surfaced three distinct trust gaps: the moment of first contact with the vehicle, the ongoing uncertainty during the ride, and the ambient environment that shapes how safe the space feels. Each design solution targets one gap directly.
The Goal - Rider Experience.
Essentially, regardless of the type of vehicle whether AV or human driver, we want a good rider experience. With great design that builds trust, we are aiming for the user journey outlined in purple.
Without intervention, rider confidence drops after initial contact and remains low throughout the ride.
My approach shifts the experience from uncertainty → informed → in control → comfortable → confident.

The Approach
I focused on three moments where trust breaks: arrival, in-ride uncertainty, and environment.
Familiarity at Arrival
The arrival experience mirrors familiar rideshare patterns while introducing guided onboarding.
The system confirms the vehicle, provides a simple entry flow.
The Bluetooth detection moment, the three-step guide (confirm → unlock → start), and the onboarding flow is triggered once per user. Subsequent rides skip directly to ride controls, preventing repetition.

Transparency of reasoning
A real-time narration layer communicates route changes, slowdowns, and unexpected behavior.
The interface reinforces this through a timeline of past, active, and upcoming actions—linking cause to effect.
This restores context and reduces ambiguity during the ride.

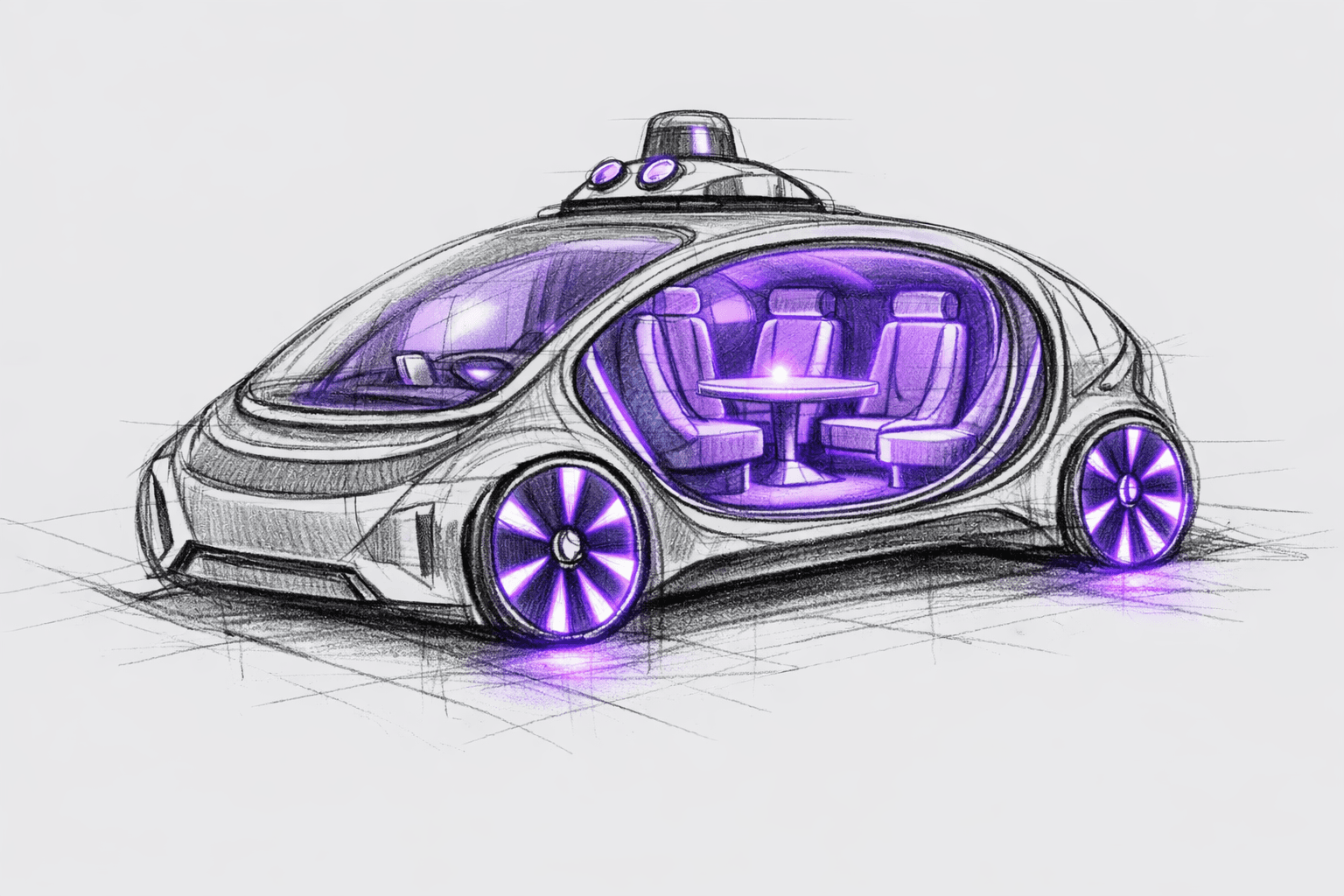
Comfort Through Environment
Without a driver, the interior becomes the primary experience.

Spatial openness and ambient lighting shift the ride to be more personable. The AV cabin can be reimagined as a living space with a digital UI controlling the physical experience.
A place to rest, work, or simply feel at ease during the ride.
Inspiration utilizing Waymo's current LiDAR technology set up and the removal of a steering wheel. The closest reference to a current working model of a no steering AV would be a ZOOX. However, there have been opinions on the shape of the ZOOX that resembles a toaster. Therefore, I wanted to keep the shape of a car but allow more space for seating and a table.
Explored spatial configurations to support relaxed, social, and work-oriented ride states.



Adding Ambiance
Inspired by James Turrell, the environment uses light as a primary material to shape perception, mood, and spatial awareness.




Final Thoughts
Trust is not an engineering problem alone. It is an experience problem.
© 2026 All rights reserved